|
||||||
|
This project presents a three-dimensional vision system for inspection activities of submarine petroleum installations by remotely operated vehicles. A real-time stereo vision system is used for the acquisition of stereo pairs of images that, after preprocessing, by applying methods of image processing such as filtering, histogram equalization and edge detection, are submitted to dimensioning of objects through stereophotogrammetric computations using nonlinear least squares algorithms to obtain three-dimensional coordinates. |
||||||

|
||||||
|
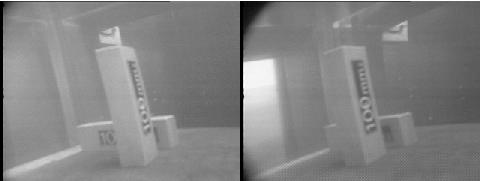
The three-dimensional vision system can be divided into three stages, as illustrated in the block diagram above. The stereo vision system consists of a pair of video cameras connected to digitizer cards, that acquire images in real time to be shown in three dimensions. Images of interest are digitized and recorded on a personal computer in stereo pairs (two images, one of each camera, of the same scene, taken at the same instant). The digitized images, before being effectively used, are submitted to the preprocessing stage, to adequate them to the process of dimensioning, which includes techniques of image processing such as histogram equalization and edge detection, with the purpose of improving the accuracy of the parameters to be extracted from the images. Finally, the preprocessed images are submitted to the dimensioning procedure, with the use of an algorithm that applies photogrammetric methods for the computation of three-dimensional coordinates, from the corresponding points in the two-dimensional coordinate system of the two images of the stereo pair. The dimensions of three-dimensional objects can then be obtained from the computed three-dimensional coordinates. |
||||||
|
||||||
|
Developed in cooperation with the Centro de Pesquisas e Desenvolvimento da Petrobras (CENPES) and with Hydratec Tecnologia Submarina, the system will be incorporated to a remotely operated vehicle to survey vertical installation of flexible oil pipelines in deep water sea floors. Its features of low cost, portability, reliability and remote operation in real time with telepresence sensation, extends its use to those situations where automation of tasks is necessary, mainly in hostile environments for the technicians involved. It can also be employed as artificial vision system for the autonomous control of unmanned vehicles. |
||||||
|
|
||||||